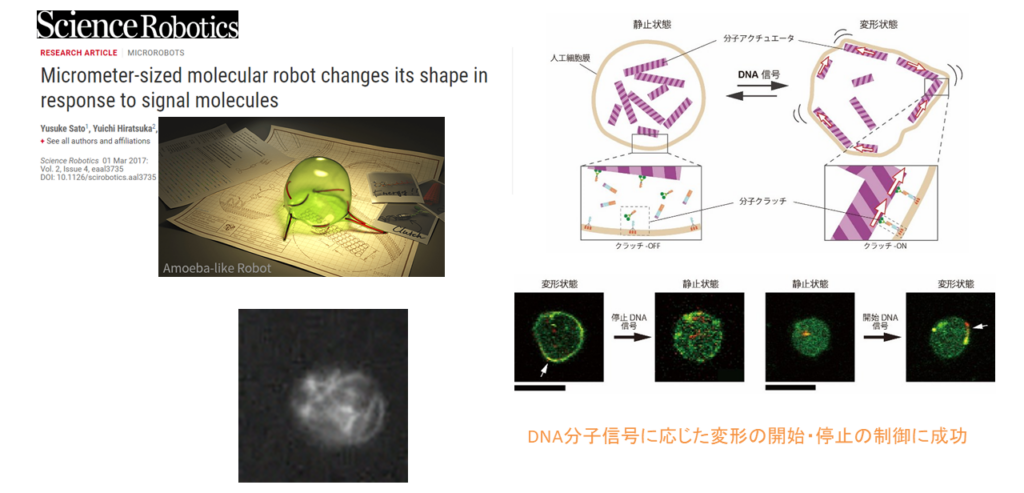
アメーバ型分子ロボット
Amoeba-like molecular robot
センサーやアクチュエータ、論理回路として機能する生体分子デバイスを組み合わせて、特定の信号分子に反応するアメーバ型分子ロボットを構築しました。このロボットは、本体、アクチュエータ、アクチュエータ制御装置(分子クラッチ)から構成されています。本体は脂質二重膜からなる小胞(人工細胞)で、アクチュエータはタンパク質、キネシン、微小管から構成されています。このロボットに光を照射して分子クラッチをON/OFFし、ロボットの形状変化挙動をON/OFFすることに成功しました。この技術は、複雑で機能的な分子システムを構築するための基盤となる技術です。
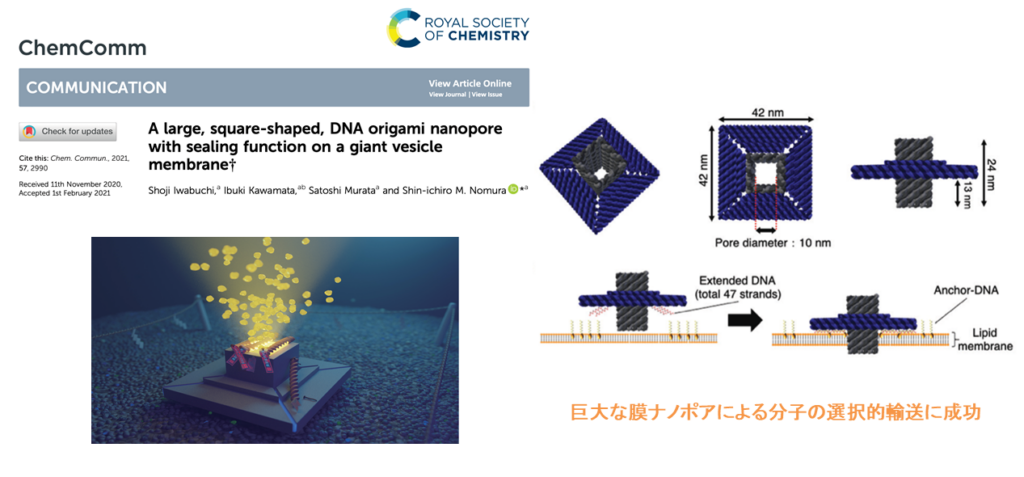
DNAオリガミナノポア
DNA origami nanopore
人工細胞・分子ロボットの機能を発揮させるためには、外部環境からの分子情報の取り込みが不可欠です。ここでは、DNAオリガミ技術をもちいて、断面積100nm2の四角いチューブを用いた膜ナノポアを設計しました。細胞膜を模した巨大ベシクルにナノ細孔で穴をあけ、最大4本のssDNA鎖を添加することで、サイズに応じた分子の選択的な輸送が可能になりました。この技術は人工細胞間の分子通信に応用可能です。
DNAオリガミナノアーム
DNA origami nanoarm
DNA分子のプログラム性と構造的な柔軟性を利用して、大変形が可能なDNAオリガミナノアームを構築しました。DNAオリガミナノアームは、張力調整可能なモジュールを連続的に繰り返したもので、直線状からアーチ状に大きく変形します。この技術のさまざまなDNAナノデバイスへの応用が期待されます。
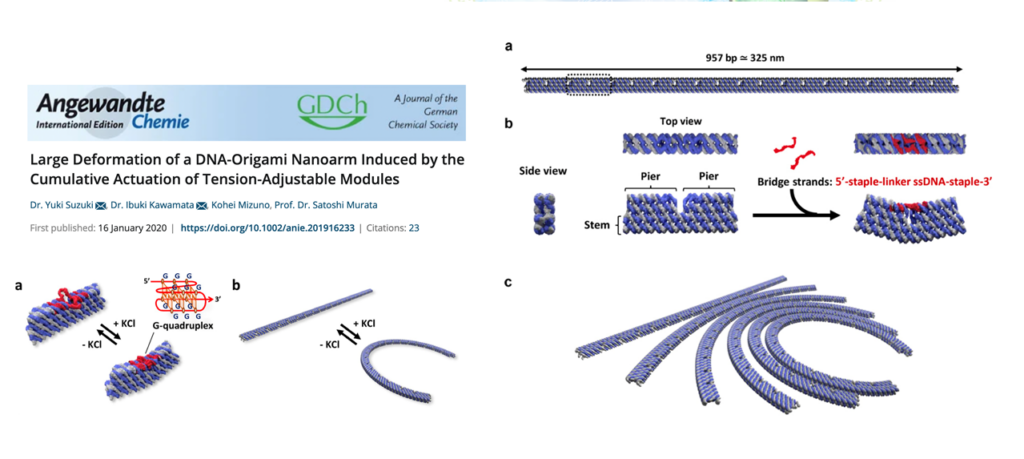
DOI:
https://doi.org/10.1002/anie.201916233